楢嵹丂僆僽僕僃僋僩巜岦偲揘妛
戞34夞丂廤崌偲幨憸
丂慜夞枠乽寋偲棏乿偲戣偟偰帺屓惗惉儌僨儖偵偮偄偰峫偊偰偒傑偟偨丅偙偺僥乕儅偼堦扷抲偄偰偍偒丄崱夞偼榖戣傪曄偊偰丄僆僽僕僃僋僩巜岦偺婎慴偲側傞乽僋儔僗偲僀儞僗僞儞僗乿偍傛傃乽僋儔僗娫偺娭楢乿傪丄悢妛偺婎慴偲側傞乽廤崌偲幨憸乿偲偺懳墳娭學偱峫偊偰傒偨偄偲巚偄傑偡丅
仭僋儔僗偺僀儞僗僞儞僗偼廤崌偺梫慺
丂僋儔僗偼僆僽僕僃僋僩偺廤崌偲懆偊傞偙偲偑偱偒傑偡丅廤崌偲偟偰傒傟偽僀儞僗僞儞僗偼廤崌偺梫慺偱偡丅
丂丂丂丂x偼僋儔僗X偺僀儞僗僞儞僗丂佁丂x偼廤崌X偺梫慺
丂偙傟傪婰崋偱昞偡側傜師偺恾1偺傛偆偵側傝傑偡丅
丂丂丂丂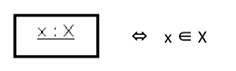
丂丂丂丂恾1丂僀儞僗僞儞僗偲梫慺
仭娭楢偲幨憸
丂俀偮偺僋儔僗X偲Y偺娫偵f偲偄偆娭楢偑偁傞偲偟傑偡丅X偐傜Y傊桿摫壜擻偲偟丄Y懁偺懡廳搙偼1偲偟傑偡丅X懁偺懡廳搙偼擟堄偱偡乮恾2乯丅
丂丂丂丂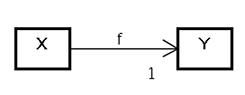
丂丂丂丂恾2丂娭楢偺儌僨儖
丂偙偺偲偒X偺擟堄偺僀儞僗僞儞僗x偵懳偟偰x偲儕儞僋偡傞Y偺僀儞僗僞儞僗y偑昁偢懚嵼偟丄y偼堦堄偱偡丅
丂丂丂丂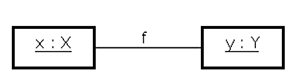
丂丂丂丂恾3丂擟堄偺x偲儕儞僋偡傞y偼堦堄偵懚嵼偡傞
丂廤崌偲幨憸偱峫偊傞側傜丄f偼廤崌X偐傜Y傊偺幨憸偱偡丅偮傑傝恾2偺僋儔僗恾偐傜
丂丂丂丂佂x伕X偵懳偟偰佄1 y伕Y : y = f(x)
偲側傝傑偡丅Y懁偺懡廳搙偼挌搙1偱側偗傟偽幨憸偲偟偰偼掕媊偱偒傑偣傫丅廬偭偰埲忋傪傑偲傔傞偲丄僋儔僗娫偺娭楢偲廤崌娫偺幨憸偺娭學偼師偺恾4偺傛偆偵側傝傑偡丅
丂丂丂丂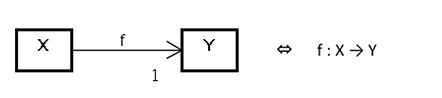
丂丂丂丂恾4丂娭楢偲幨憸偺娭學
仭懡廳搙偲幨憸偺娭學
丂師偼X懁偺懡廳搙偲幨憸偺娭學傪峫偊傑偡丅娭楢偺懡廳搙偼幨憸偲偟偰慡幩乛扨幩乛慡扨幩偺堘偄偲娭學偟傑偡丅
仭慡幩onto (surjection)
丂X懁偺懡廳搙傪1埲忋偲偟傑偡丅恾5偺傛偆偵1..*偱傕扨偵2偱傕偐傑偄傑偣傫丅偙偺偲偒幨憸f : X仺Y偼慡幩偲側傝傑偡丅偮傑傝僋儔僗恾偺X懁偺懡廳搙>0側偺偱
丂丂丂丂佂y伕Y偵懳偟偰佄x伕X : y = f(x)
偲側傝丄恾5偺娭學偑惉棫偟傑偡丅
丂丂丂丂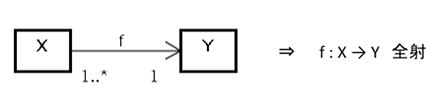
丂丂丂丂恾5丂慡幩偺椺
丂媡偼丄慡幩偱偁傞偨傔偵偼
丂丂丂丂佂y伕Y偵懳偟偰佄x伕X : y = f(x)
偲側傞僀儞僗僞儞僗x偑懚嵼偡傟偽傛偄偺偱丄僋儔僗X懁偺懡廳搙>0偱偁傟偽忦審偑枮偨偝傟傑偡丅傑偲傔傞偲恾6偺娭學偑惉棫偟傑偡丅
丂丂丂丂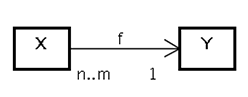
丂丂丂丂n>0偐偮乮m亞n傑偨偼m=*乯佁丂f : X 仺 Y 偼慡幩
丂丂丂丂恾6丂懡廳搙偲慡幩偺娭學
仭扨幩one to one (injection)
丂X懁偺懡廳搙傪0..1偲偟傑偡丅偙偺偲偒幨憸f : X仺Y偼扨幩偲側傝傑偡丅偮傑傝僋儔僗恾偐傜
丂丂丂丂x0伕X, x1伕X, x0亗x1丂佀丂f(x0) 亗 f(x1)
偲側傝傑偡丅
丂媡偵扨幩側傜丄傕偟傕X懁偺懡廳搙>1側傜偽僋儔僗X偺傆偨偮偺僀儞僗僞儞僗x1偲x2偑 Y偺傂偲偮偺僀儞僗僞儞僗偲儕儞僋偡傞偙偲傕偁傞偺偱f(x1)=f(x2)偲側傝f偑扨幩偱偁傞慜採偵柕弬偟傑偡丅
丂丂丂丂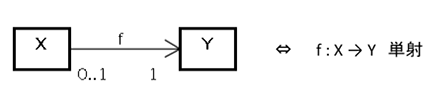
丂丂丂丂恾7丂懡廳搙偲扨幩偺娭學
仭慡扨幩one to one, onto (bijection)
丂X懁偺懡廳搙傕挌搙1側傜偽幨憸f : X仺Y偼慡扨幩偱偡丅
丂丂丂丂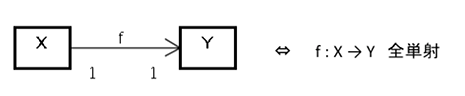
丂丂丂丂恾8丂懡廳搙偲慡扨幩偺娭學
仺曽岦偺徹柧
丂丂丂丂佂y伕Y偵懳偟偰佄x伕X : y = f(x) 亪f偼慡幩
丂丂丂丂x0伕X, x1伕X, x0亗x1丂佀丂f(x0) 亗 f(x1) 亪f偼扨幩
仼曽岦偺徹柧
丂丂丂丂f偼慡幩側偺偱X懁偺懡廳搙>0
丂丂丂丂f偼扨幩側偺偱X懁偺懡廳搙亝1
丂丂丂丂亪X懁偺懡廳搙=1
乮埲壓師夞乯
亂嶲峫彂愋亃
[1]悾嶳巑榊乽側偭偲偔偡傞廤崌乛埵憡乿島択幮丄2001
ODL Object Design Laboratory, Inc. Akio Kawai