楢嵹丂僆僽僕僃僋僩巜岦偲揘妛
戞35夞丂廤崌偲幨憸乮俀乯亅 娭楢偲娭楢僋儔僗
丂慜夞偼丄僆僽僕僃僋僩巜岦偺婎慴偲側傞乽僋儔僗偲僀儞僗僞儞僗乿偍傛傃乽僋儔僗娫偺娭楢乿傪丄悢妛偺婎慴偲側傞乽廤崌偲幨憸乿偲懳斾偟偰峫偊傑偟偨丅
丂僋儔僗娫偺娭楢偼廤崌娫偺幨憸偵懳墳偟丄娭楢偺懡廳搙偼幨憸偺扨幩乛慡幩乛慡扨幩偲懳墳偡傞偙偲傪帵偟傑偟偨丅
丂崱夞偼娭楢偲娭楢僋儔僗偵偮偄偰丄廤崌偲幨憸偺娤揰偐傜惍棟偟傑偡丅
仭廤崌娫偺儅僢僺儞僌
丂俀偮偺廤崌偺梫慺娫偺壗傜偐偺堄枴揑側娭學傪儅僢僺儞僌偲屇傇偙偲偵偟傑偡丅
椺偊偽恾1偼廤崌X偲Y偺儅僢僺儞僌傪丄梫慺娫傪慄偱愙懕偡傞偙偲偱昞偟偰偄傑偡丅偙偺娭學偼昁偢偟傕1懳1偲偼尷傝傑偣傫丅
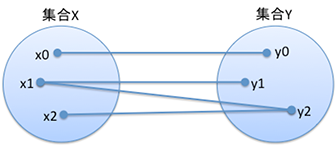
丂廤崌娫偺儅僢僺儞僌偼梫慺偺僞僾儖偱昞偡偙偲偑偱偒傑偡丅恾1側傜(x0, y0) 丄(x1, y1)丄 (x1, y2) 偍傛傃(x2, y2)偺係偮偺僞僾儖偱昞偡偙偲偑偱偒傑偡丅
仭儕儞僋偲偼
丂僆僽僕僃僋僩巜岦梡岅偺儕儞僋偲偼丄僆僽僕僃僋僩嶲徠偺僞僾儖偱偡丅
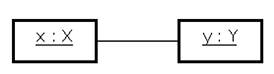
僋儔僗X偺僀儞僗僞儞僗x偲僋儔僗Y偺僀儞僗僞儞僗y偺儕儞僋偼丄x偲y偺僞僾儖 (x, y) 偱昞偡偙偲偑偱偒傑偡丅UML偱師偺傛偆偵婰弎偟傑偡丅
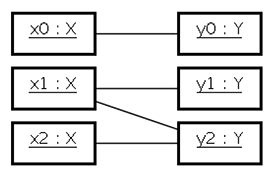
丂恾侾偺X偲Y傪僋儔僗偲峫偊傞側傜丄廤崌偲偟偰偺梫慺娫偺儅僢僺儞僌偼僆僽僕僃僋僩娫偺儕儞僋偲偟偰恾俁偺傛偆偵昞偡偙偲偑偱偒傑偡丅
仭娭學傪廤崌偲峫偊傞
丂恾侾偺廤崌娫偺儅僢僺儞僌傕傑偨傂偲偮偺廤崌偲峫偊傞偙偲偑偱偒傑偡丅X偲Y偺儅僢僺儞僌傪昞偡係偮偺僞僾儖偐傜側傞廤崌傪R偲偟傑偡丅恾侾偼廤崌偲偟偰師偺傛偆偵昞偡偙偲偑偱偒傑偡丅
丂丂丂丂X = {x0, x1, x2}
丂丂丂丂Y = {y0, y1, y2}
丂丂丂丂R = {(x0,y0), (x1,y1), (x1,y2), (x2,y2)}
仭娭楢偲偼
丂廤崌R傪僋儔僗偲峫偊傑偡丅廤崌傪僋儔僗偲屇傇埲忋偁傞忦審傪枮偨偟偰偄傞昁梫偑偁傝傑偡偑丄偦傟偼崱偼抲偄偰偍偒傑偡丅
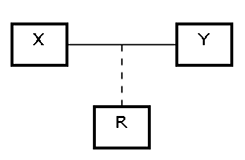
丂UML偱偼僋儔僗娫偺娭楢偲偼僀儞僗僞儞僗娫偺儕儞僋傪堄枴偟傑偡丅屄乆偺僀儞僗僞儞僗娫偺儕儞僋傪拪徾壔偟偨傕偺偑僋儔僗娫偺娭楢偱偡丅UML偱偼僋儔僗娫傪慄偱寢傫偱娭楢傪昞偟傑偡丅椺偊偽恾係偼僋儔僗X偲Y偺娭楢傪昞偟傑偡丅
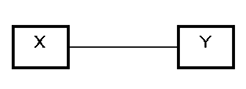
丂恾俁偺係偮偺儕儞僋偑偙偙偵娷傑傟傑偡丅
仭娭楢僋儔僗偲偼
丂娭楢偼儕儞僋偺廤崌偲偟偰僋儔僗偲峫偊傞偙偲偑偱偒傞側傜丄UML偱偼嬮宍偱昞偡偙偲傕偱偒傞敜偱偡丅偙偺娭楢偲僋儔僗偲偄偆俀偮偺堄枴傪傕偮UML偺梫慺傪娭楢僋儔僗偲屇傃丄恾俆偺傛偆偵昞偟傑偡丅
丂娭楢僋儔僗R偺僀儞僗僞儞僗偼X偲Y偺僀儞僗僞儞僗傪寛傔傟偽堦堄偵寛傑傝傑偡丅
仭娭楢僋儔僗偲幨憸
丂廤崌偲幨憸偱峫偊傞側傜X偲Y偺捈愊X亊Y偐傜R傊偺幨憸f傪
丂丂丂丂f : X 亊 Y 仺 R
丂丂丂丂x伕X, y伕Y偵懳偟偰f(x, y) = (x, y)伕R
偲掕媊偡傞偙偲偑偱偒傑偡丅
丂偙偺幨憸f偼慡扨幩偱偡丅
慡幩
扨幩
乮埲壓師夞乯
亂嶲峫彂愋亃
[1] 悾嶳巑榊乽側偭偲偔偡傞廤崌乛埵憡乿島択幮丄2001
[2] J.Martin, J.Odell, 乬Object Oriented Methods 亅 A Foundation乭, Prentice Hall, 1998
ODL Object Design Laboratory, Inc. Akio Kawai